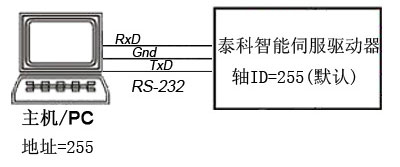
01、主机或PC通过标准RS232接口,设置、调整驱动器、电机及传感器参数,编程监控驱动器,组成独立单轴运动控制系统,最高达115kbit/s。
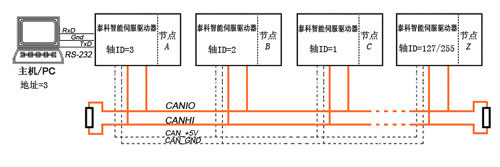
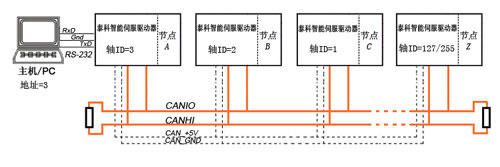
02、主机或PC与多轴网络中任一轴通过RS232通信,做为中间轴。驱动器之间通过CAN通信,通过中间轴与主机交换信息,省去CAN接口卡成本,组成高速、低成本、简单的多轴分布式网络运动控制系统,最高达115kbit/s。
03、主机或PC通过RS485与驱动器通信,组成多达256轴分布式网络运动控制系统,最高达115kbit/s。
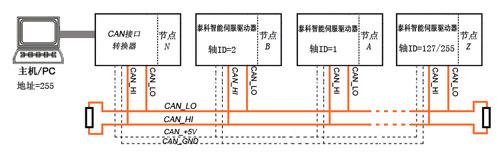
04、主机或PC通过CAN/CANopen与驱动器通信,组成多达256轴分布式网络运动控制系统,最高达1Mbit/s(CAN2.0A/CAN2.0B)。
|

