01、带增量式编码器,交流无刷(永磁同步)旋转伺服电机位置、速度、转矩控制 。交流无刷电机采用矢量控制,工作时,电压与电流为正弦波。
02、带增量式编码器,交流无刷(永磁同步)直线伺服电机位置、速度、转矩控制 。交流无刷电机采用矢量控制,工作时,电压与电流为正弦波。
03、带数字霍尔传感器和增量编码器,直流无刷旋转伺服电机位置、速度、转矩控制 。无刷电机控制时采用霍尔传感器换相,工作时,电压与电流为梯形方波。
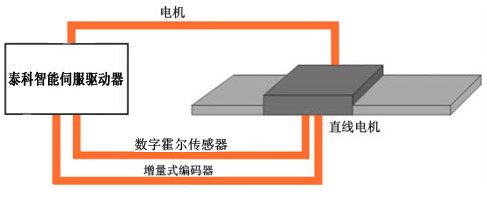
04、带数字霍尔传感器和增量编码器,直流无刷直线伺服电机位置、速度、转矩控制 。无刷电机控制时采用霍尔传感器换相,工作时,电压与电流为梯形方波。
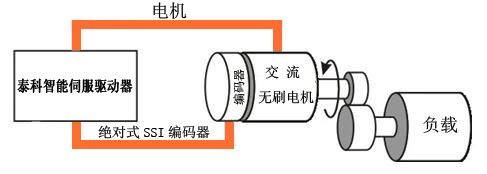
05、带绝对式SSI编码器,交流无刷(永磁同步)旋转伺服电机位置、速度、转矩控制 。交流无刷电机采用矢量控制,工作时,电压与电流为正弦波。
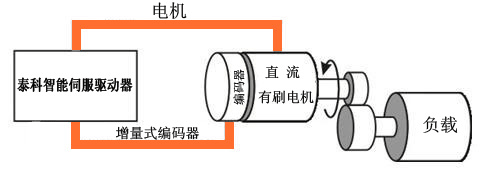
06、带增量式编码器,直流有刷旋转伺服电机位置、速度、转矩控制 。直流有刷电机采用碳刷换相,工作时,电压与电流为方波。
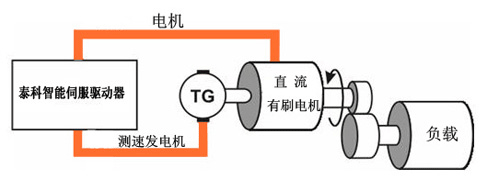
07、带测速发电机,直流有刷旋转伺服电机速度、转矩控制 。直流有刷电机采用碳刷换相,工作时,电压与电流为方波。
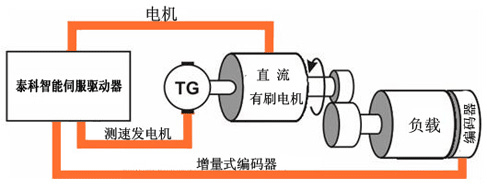
08、负载上带增量式编码器用为负载位置控制与电机轴上带测速发电机为速度、力矩控制相结合为直流有刷旋转伺服电机全闭环高精度、高响应控制 。直流有刷电机采用碳刷换相,工作时,电压与电流为方波。
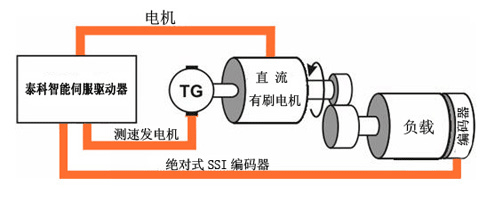
09、负载上带绝对式SSI编码器用为负载位置控制与电机轴上带测速发电机为速度、力矩控制相结合为直流有刷旋转伺服电机全闭环高精度、高响应控制 。直流有刷电机采用碳刷换相,工作时,电压与电流为方波。
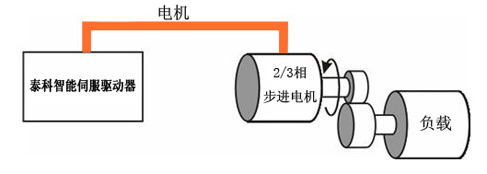
10、2/3相步进电机位置或速度的开环控制 。2/3相步进电机采用正弦波细分双极控制。
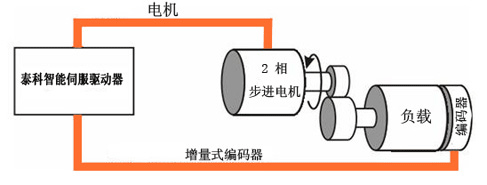
11、在负载上带增量编码器为负载位置闭环控制与2相步进电机速度开环控制(速度参考量由位置控制器提供)组成步进电机全闭环高精度、高响应位置、速度、力矩控制。
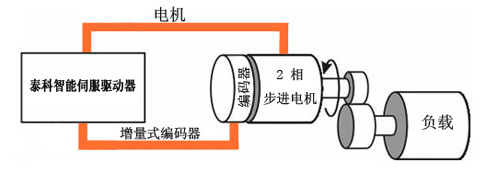
12、2相步进电机位置、速度、转矩闭环控制 。
|

